ASTER: An Attentional Scene Text Recognizer with Flexible Rectification + spline interpolation
22 May 2019 | ml ocrASTER: An Attentional Scene Text Recognizer with Flexible Rectification
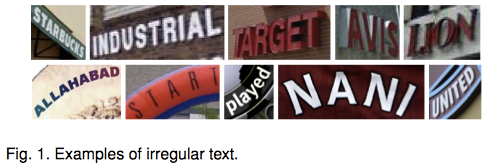
- irregular text에 대해서 잘 인식해보겠다.
- 두가지 네트워크로 구성
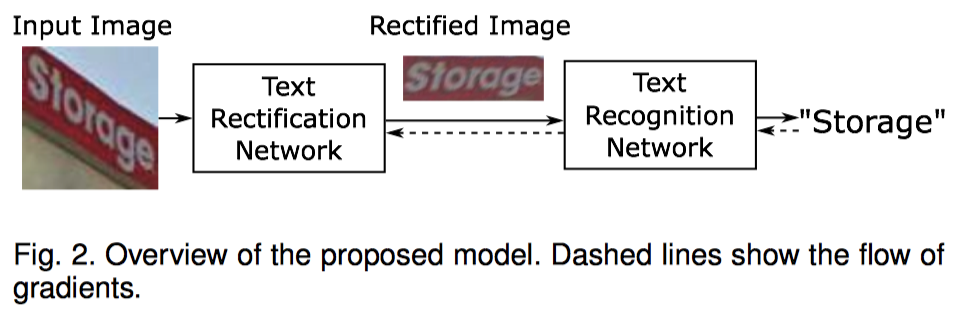
- Rectification network
- Thin-Plate Spline의 parameter를 추정하고 이를 통해 transformation
- Spatial Transformer Networks framework로 annotation 없이 바로 학습 가능 (모두 미분 가능)
- input:
64 x 256으로 resize - output:
32 x 100 - sampler는 여기 참조
- Recognition network
- Attentional seq2seq
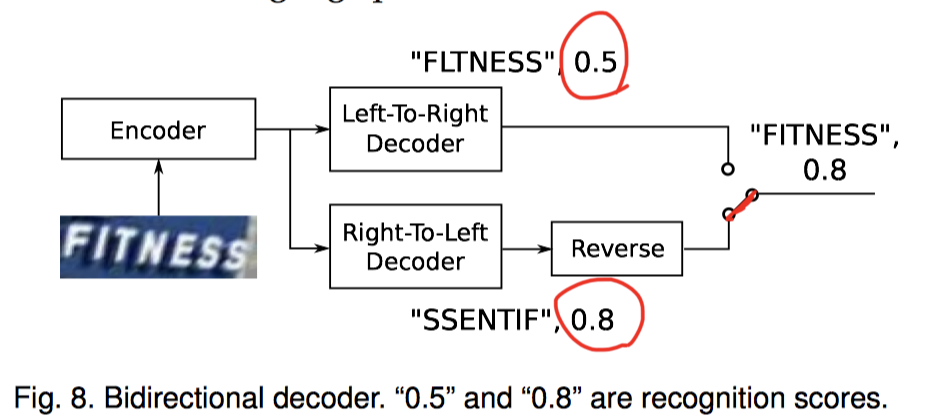
- Decoder를 BiDirectional로 만듬
- Contributions
- irregular text 문제를 explicit rectification mechanism을 사용해서 풀었다.
- bidirectional decoder를 만듬
- 뒤에서부터 볼 때 더 context가 좋을 수 있음
- 예>
FITNESS에서I를 알려면FI보다SSENT가 더 좋다.
- ASTER를 사용해서 text detection을 더 잘할 수 있는 방법 제시
- conference version보다 더 좋게 만듬
- rectification network를 고쳐서 성능을 올림
- control points prediction과 sampling에 다른 화질의 이미지를 사용
- localization network의 non-linear activation을 없애서 수렴을 더 빨리하도록
- 결과적으로 accuracy, rectified image quality, sensitivity가 좋아짐
- bidirectional
- end2end application을 해봄
- rectification network를 고쳐서 성능을 올림
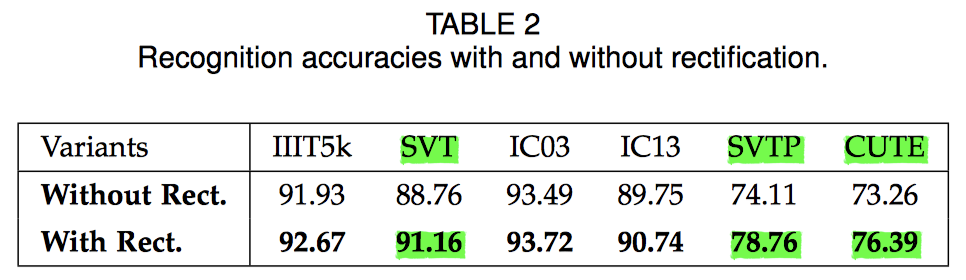
- 결과
- rectifier를 넣어보니 SVTP, CUTE 등 irregular text에 대한 dataset에 대해서 3~4% 올라가더라..
- rectifier를 넣어보니 SVTP, CUTE 등 irregular text에 대한 dataset에 대해서 3~4% 올라가더라..
Appendix
Cubic spline interpolation
Thin-plate spline transformation에 앞서 1D interpolation 기법인 Cubic spline interpolation을 알아보자
- Cubic
- line을 3차식으로 근사시키겠다
- $f(x) = a + bx + cx^2 + dx^3$
- spline
- 복수의 제어점을 통과하는 곡선.
- 인접한 두 점마다 별도의 다항식을 이용하여 곡선을 정의
- Cubic spline interpolation
- interpolation을 하는데, cubic spline을 이용한다.
how to calculate?
- 각 line을 3차식으로 놓으면 변수가 4개씩 생김
- 인접한 line은 1차, 2차 미분이 연속적임. $C^2$
- 각 line은 주어진 점을 지남
- 위 두가지 constraint + boundary condition으로 연립 방정식을 풀면 된다.
- natural cubic spline
- 양 끝 라인의 이차미분값이 0
- clamped cubic spline
- 양 끝 라인의 일차 미분값이 주어짐
- natural cubic spline
Cubic spline transformation
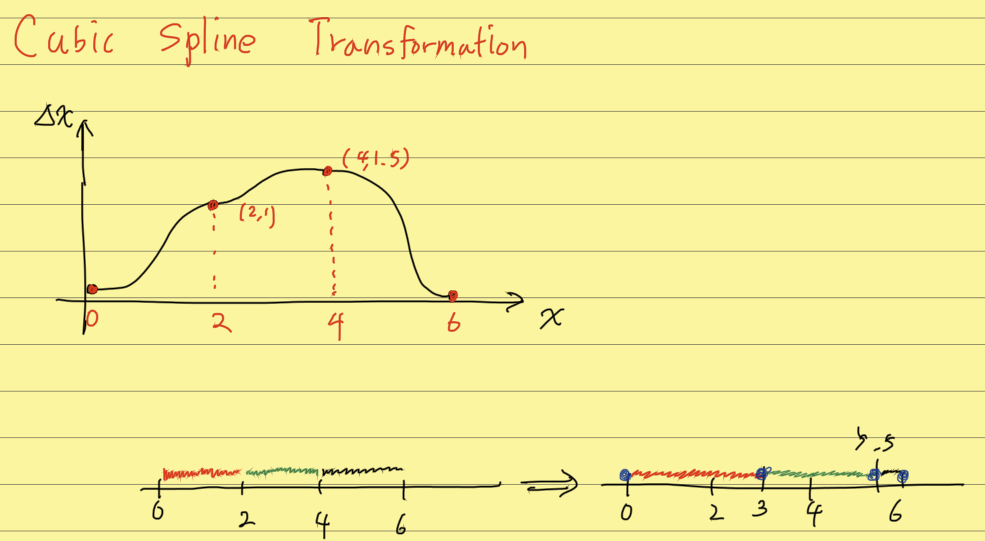
- 위의 빨간 점들이 1차원 라인에 대한 변위량을 나타낸다고 하면
- Cubic spline interpolation을 사용하여 검은 선을 만들 수 있다.
- 검은 선들을 통해서 변화된 1차원 라인을 만들 수 있음.
Thin plates
- 얇은 판이 휘어지는 것으로 interpolation을 함.
- $ f(x,y) = a_1 + a_2x + a_3y + \Sigma_{i=1}^{n}w_i U(\vert P_i-(x, y) \vert ) $
- $U(r) = r^2log(r)$
- 더 자세한 내용은 여기 참조