RL ch 3. Grid world & DP
12 Mar 2018
|
ml
rl
policy iteration
DP
value iteration
bellman equation
3장 - 강화학습 기초 2: Grid world & Dynamic programming
- 앞서서 MDP를 정의하고, Bellman 방정식들을 봤음
- dynamic programming을 통해서 최적 가치함수와, 최적 정책을 구하는 것이 이 장의 목적
- 다음 두가지 방법을 배움
- Policy iteration
- Bellman expectation eq. 을 사용
- Value iteration
- Bellman optimality eq.를 사용
- 쉽게 설명하기 위해 Grid world 예제를 사용하고, state transition probability는 무시한다.
Policy iteration
- 다음 세단계로 이루어짐
- policy 초기화
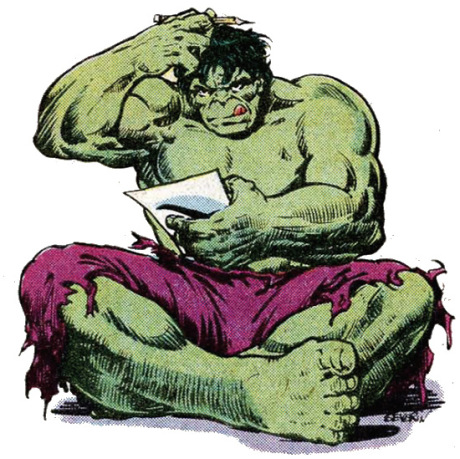
- policy evaluation
- review
- BEE: $v_\pi(s) = \underset{a \in A}{\Sigma}\pi(a \vert s)(R_{t+1} + \gamma v_\pi(s’))$
- 위 수식을 iteration을 돌면서 구해본다
- $v_{k+1}(s) = \underset{a \in A}{\Sigma}\pi(a \vert s)(R_{t+1} + \gamma v_k(s’))$
- 이걸 모든 상태 s에 대해 수행
- policy improvement
- 여러가지 가능하나 Greedy Improvement를 소개한다.
- review
- q-func: $q_\pi(s,a) = E_\pi[R_{t+1} + \gamma v_\pi(S_{t+1}) \vert S_t=s, A_t=a]$
- $q_\pi(s,a) = R_{s}^a + \gamma v_\pi(s’)$ 로 고침
- 위 식을 최대화하는 action a를 반환하는 정책
- policy와 value-function이 분리되어있음
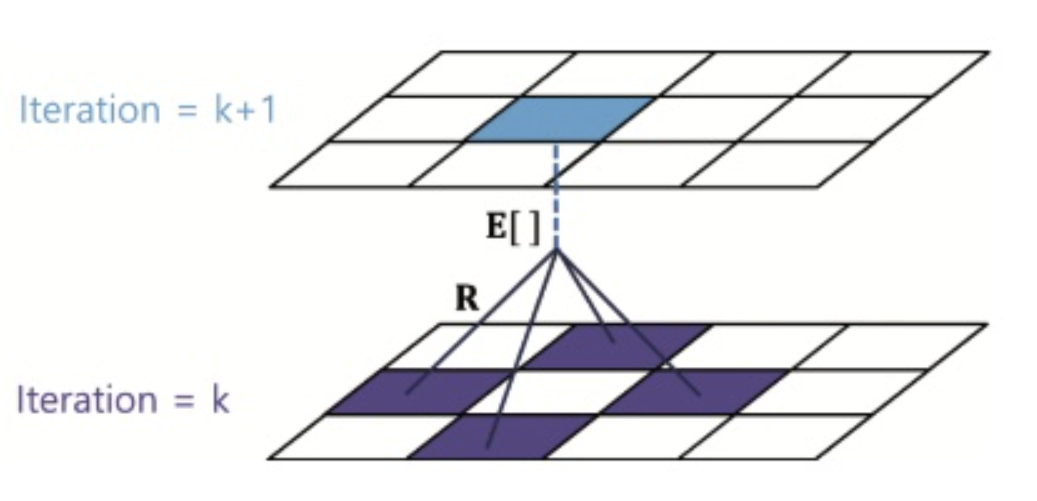
Value iteration
- value function에 대해서 최적의 value func.만 뽑는 정책을 가정함
- 이러면 val. func.에 policy그 내재됨
- v(s)만 잘 업데이트하면 되겠다!
- review
- 요걸 똑같이 update하는 식으로 만들면
- $v_{k+1}(s) = \underset{a \in A}{max}[R_s^a+\gamma v_k(s’)]$
DP의 한계
- 계산 복잡도 및 curse of Dim.
- 환경에 대한 완벽한 정보가 필요!!