RL ch 4. Grid world & Q-learning
14 Mar 2018 | ml rl sarsa q-learning monte-carlo temporal difference강화학습 기초 3: Grid world & Q-learning
- RL은 환경의 모델을 몰라도 상호작용을 통해 학습이 가능
-
DP는 환경의 모델을 알아야함
- 예측: policy가 주어졌을 때, Value func.를 계산하는 것(evaluation)
- 몬테카를로 예측
- 시간차 예측
- 제어: Value func.를 토대로 agent의 optimal policy를 찾는 것(Improvement)
- Sarsa (시간차 제어)
- Q-learning (off-policy)
강화학습과 정책 평가 1: Monte-carlo prediction(MC)
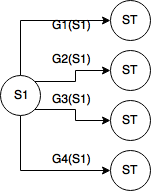 ST: terminal state, Gi: i번째 episode의 return
ST: terminal state, Gi: i번째 episode의 return
- DP에서는 모든 state에 대해서 동시에 update를 함
- review (B.E.E.)
- $v_\pi(s) = E_\pi[R_{t+1} + \gamma v_\pi(s’)]$
- Sampling을 통해서 $v_\pi$를 구해보자!
- 끝까지 episode를 진행시켜서 $G_t$를 얻어냄
- 그 $G_t$들을 평균내서 쓰겠다
- sample update(n개의 sample이 있을 때, n+1번째 sample이 들어옴)
- 일반 업데이트 식
- $V(s) \leftarrow V(s) + \alpha(G(s) - V(s))$
- $G(s)$에 다가가도록 step-size($\alpha$)만큼 update
- 장점
- 각 state에 independent하다
- DP에서는 인접 state에 대해서 구했는데…
- $V(s) \leftarrow V(s) + \alpha(G(s) - V(s))$로 끝남
- 전체 state가 아닌 특정 state에 대해서만 구해도 된다.
- 각 state에 independent하다
- 단점
- 모든 state를 가보지 못했는데, guarantee할 수 있나?
- 주어진 정책대로 간다면 갈 확률이 거의 없으니 괜찮음…
- episode가 끝나야지 update를 할 수 있네????
- episode가 끝나지 않는 문제에는 적용 못함 ㅠ
- temporal diff로 가자!
- 모든 state를 가보지 못했는데, guarantee할 수 있나?
강화학습과 정책 평가 2: Temporal difference(TD)
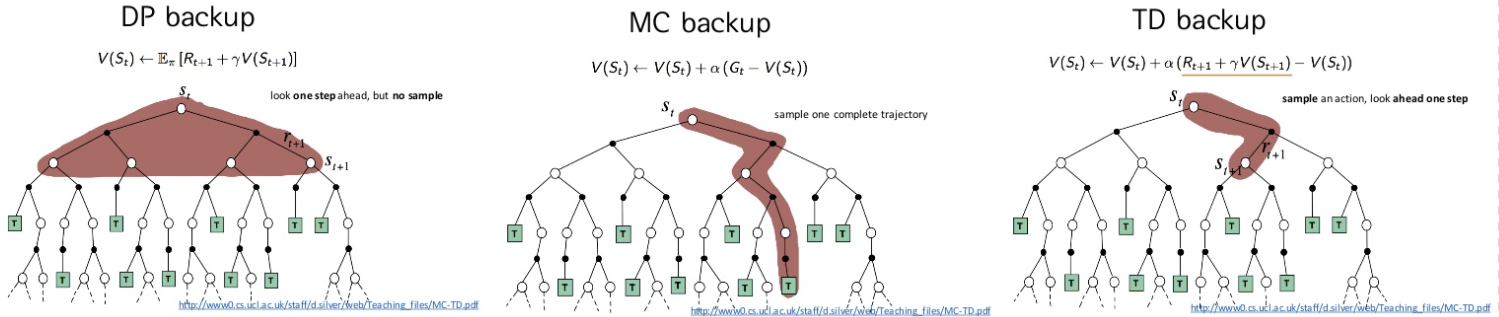
- Monte-carlo의 수식을 다시 살펴보자
- $V(S_t) \leftarrow V(S_t) + \alpha(G_t - V(S_t))$
- $G_t$는 episode가 끝나야 알 수 있다.
- $G_t = R_{t+1} + \gamma v_\pi(s’)$
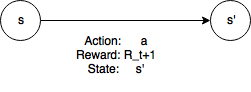
- episode의 중간 상태에서(s) 액션(a)를 취하면 다음 상태(s’)과 보상 $R_{t+1}$을 알 수 있다.
- 현재의 보상 $R_{t+1}$에 예측한 value func. $V(s’)$을 $G_t$대신 쓰는 것이 Temporal difference!!
비교
- MC : high variance, zero bias
- TD : low variance, some bias
- 하지만 MC보다 효율적이고, 더 빨리 수렴한다.
- 초기값에 sensitive(bootstrap)
사실 위의 TD는 TD(0)며, TD(n)의 경우 n스텝을 더 본 이후 $G_t$를 예측한다.
강화학습 알고리즘 1: Sarsa
- GPI(Generalized Policy Iteration)
- policy iteration인데, evaluation / improvement를 한번씩 번갈아가며 진행
- 이렇게 해도 수렴이 된다네…
- Sarsa
policy evaluation: Temporal differencepolicy improvement- Greedy policy
- $Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha(R_{t+1} + \gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t) )$
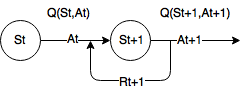
- $(S_t, A_t, R_{t+1}, S_{t+1}, A_{t+1})$가 학습에 필요!
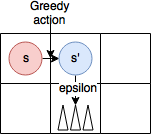
- $\epsilon$-greedy
- 위 식에서 action들은 greedy policy를 따른다면, Q-func의 초기값에 지배됨!
- 그래서 어느정도는 탐험이 필요함
- Greedy policy
- 정리
- $\epsilon$-greedy 방식으로 sample $(S_t, A_t, R_{t+1}, S_{t+1}, A_{t+1})$ 를 얻어냄
- 이 샘플로 $Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha(R_{t+1} + \gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t) )$를 계산하고 update
강화학습 알고리즘 2: Q-learning
- Sarsa의 한계
- 다음 state의 action이 탐험에 의해서 잘못된 선택을 할 경우, 좋은 action이 penalty를 받는다.
- $Q(s’,a’)$가 작기 때문에…
- on-policy temporal difference control
- 자신이 행동하는대로 학습하는 시간차 제어
- Q-learning
- off-policy TD control
- 행동하는 정책
- 학습하는 정책
- 을 따로 가져가자!
- $Q(S_t, A_t) \leftarrow Q(S_t, A_t) + \alpha(R_{t+1} + \gamma \underset{a’}{max}Q(S_{t+1}, a’) - Q(S_t, A_t) )$
- 다음 state의 action을 greedy로
- 학습할 것은 $\epsilon$-greedy지만,
- 그 안에서 가져오는 것은 greedy로 가정
- $(S_t, A_t, R_{t+1}, S_{t+1})$ 가 필요
- 다음 state의 action을 greedy로
- off-policy TD control